vla-models
Defining the Stack: Why "Levels of Autonomy" is Dead
BCG and Deloitte just retired the automotive industry's L1–L5 framework for robots. The new benchmark is causal reasoning, not scripted precision.
By The Editorial Board · June 22, 2026 · 6 min read

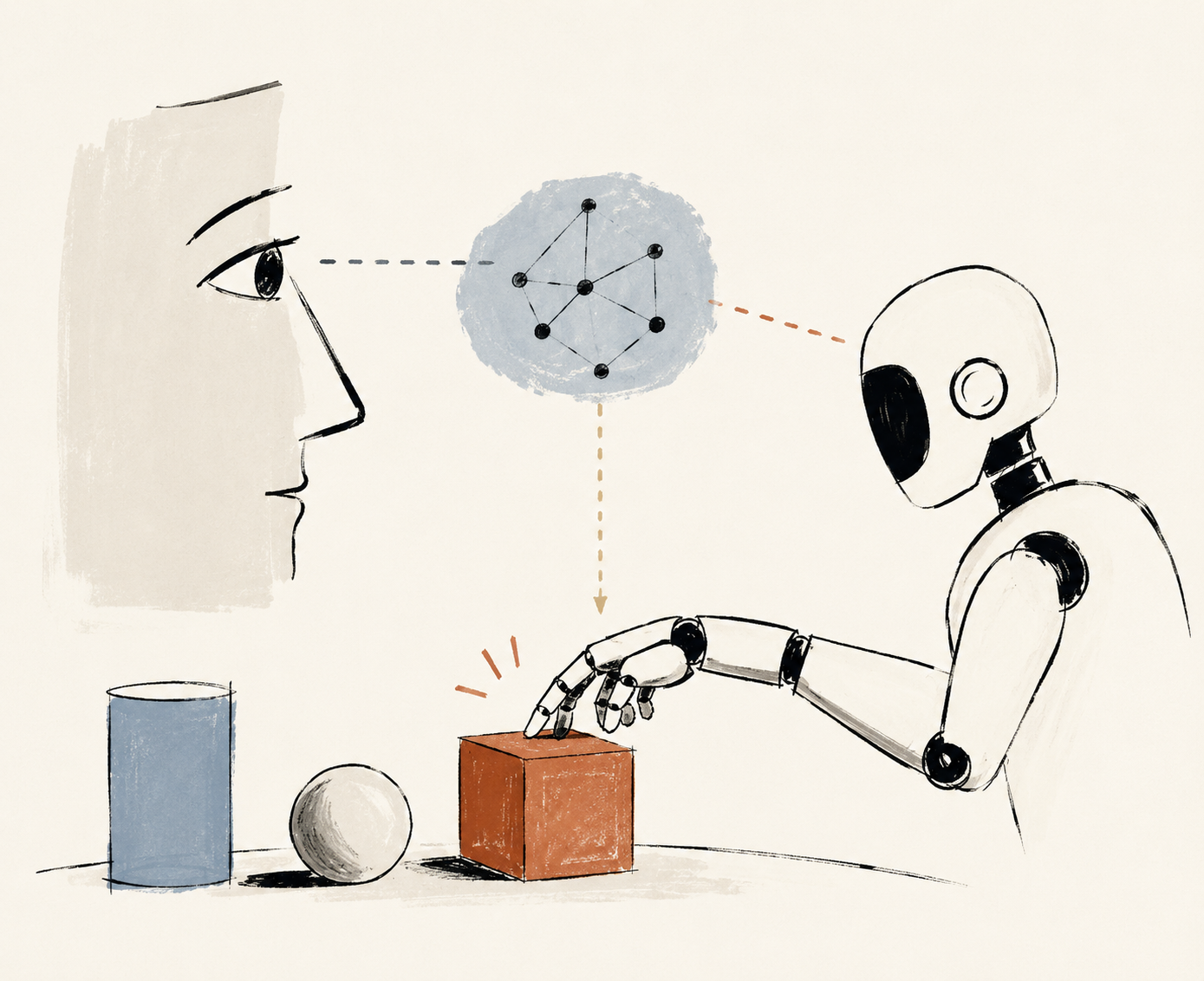
A whiteboard diagram contrasting rigid robotic arm paths with adaptive robot reasoning
The robotics industry is suffering from a profound vocabulary problem. For the past decade, executives and engineers have relied on the automotive industry's "Levels of Autonomy" (L1 through L5) to describe the capabilities of a machine. But as true physical AI begins to walk onto our factory floors and into our logistics centers, these old metrics have become dangerously obsolete.
This week, major consultancies including BCG and Deloitte published comprehensive new frameworks that officially discard "explicit programming" as the benchmark for robotic capability. Instead, the industry is pivoting toward metrics that actually matter: workflow planning and causal reasoning.
For business leaders, this is more than an academic shift in terminology. It is a fundamental redefinition of what a robot is, and what you are actually buying when you invest in one.
The 1980s Hangover: Blind Automation
To understand the new stack, we must first unlearn the old one.
The robotic arms that have populated automotive assembly lines since the 1980s are mechanical marvels, but they possess exactly zero intelligence. They operate on explicit programming. An engineer writes a script that commands the actuators to move to a highly specific set of XYZ coordinates in three-dimensional space, close a gripper, and move to another coordinate.
If a steel panel is exactly where it is supposed to be, the system works flawlessly. If that panel is shifted two inches to the left, the robotic arm will grasp empty air or crush the panel entirely. The machine has no understanding of what it is holding, why it is holding it, or what happens if it drops it. It is blind, deaf, and functionally unconscious.
The old metric of autonomy merely asked: How reliably can the machine repeat this exact script without human intervention?
The VLA Revolution: Vision, Language, and Action
The new frameworks established this week explicitly separate legacy automation from true embodied intelligence. The dividing line is the Vision-Language-Action (VLA) model.
A VLA model is the cognitive bridge between a broad human request and a machine's physical movement. It operates in three distinct, integrated phases:
| Phase | Function | The Shift from Legacy Systems |
|---|---|---|
| Vision | Semantic mapping of the unstructured physical world. | Moving from "blind coordinate movement" to "real-time spatial and object recognition." |
| Language | Processing natural human commands (e.g., "Sort the heavy boxes"). | Moving from "writing complex C++ scripts" to "conversational task assignment." |
| Action | Translating intent into dynamic motor torque and joint trajectory. | Moving from "rigid path execution" to "adaptive, on-the-fly physical manipulation." |
Under this new stack, you do not program a robot. You assign it a goal. The VLA model takes the objective, surveys the chaotic environment, and dynamically writes its own real-time physical code to accomplish the task.
Understanding Gravity, Friction, and Consequence
The most radical element of the BCG and Deloitte frameworks is the introduction of causal reasoning as a metric for robotic maturity.
True physical AI requires what researchers call a "world model", an internalized, predictive understanding of physics. A machine running a sophisticated VLA model understands gravity; it knows that if it pushes a glass beaker near the edge of a table, it will fall and shatter. It understands friction; it knows that a sleek metal block will slip from its manipulators differently than a porous sponge.
Most importantly, it understands consequence.
When a human worker encounters a torn, structurally weak cardboard box, they intuitively adjust their grip to avoid ripping it further. A legacy robot would simply execute its pre-programmed pinch force, tearing the box open and dumping its contents onto the conveyor belt. A VLA-equipped physical AI, however, visually assesses the structural damage in real-time, infers the causal consequence of applying standard pressure, and dynamically decides to slide its manipulators underneath the payload instead.
The Executive Takeaway
This shift from mechanical execution to cognitive reasoning drastically changes how capital should be deployed.
When evaluating a robotics vendor today, the physical speed and payload capacity of the hardware, while still important, are secondary considerations. The true test of enterprise value is cognitive flexibility. The questions business leaders must now ask are fundamentally different:
- Can the robot's software stack autonomously plan a multi-step workflow?
- Can it recover from a physical mistake (like dropping an item) without triggering a system-wide error?
- Can it reason its way through an environment that changes shape from hour to hour?
The era of the rigidly programmed machine is closing. As these new frameworks make clear, the future belongs to machines that don't just move through the physical world, but actually understand it.
More From Robotics Weekly

Part of Issue 2: The Reckoning, published June 22, 2026→